Устройство синхронного двигателя
Содержание:
- Униполярные и шаговые варианты
- Устройство синхронного двигателя
- Принцип работы синхронного электродвигателя
- Синхронные двигатели: устройство и принцип действия
- СПОСОБЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
- Принцип работы синхронного двигателя
- Асинхронные и синхронные двигатели: устройство
- Система трехфазного тока
- Область применения
- Электромагнитные процессы и вращение
- Применение синхронных двигателей:
- Пуск синхронного двигателя
- Синхронный двигатель (СД)
Униполярные и шаговые варианты
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…
В быту, коммунальном хозяйстве, на любом производстве двигатели электрические являются неотъемлемой составляющей: насосы, кондиционеры, вентиляторы и пр
Поэтому важно знать типы наиболее часто встречающихся электродвигателей
Электродвигатель является машиной, которая преобразует в механическую энергию электрическую. При этом выделяется тепло, являющееся побочным эффектом.
Видео: Классфикация электродвигателей
Все электродвигатели разделить можно на две большие группы:
- Электродвигатели постоянного тока
- Электродвигатели переменного тока.
Электродвигатели, питание которых осуществляется переменным током, называются двигателями переменного тока, которые имеют две разновидности:
- Синхронные – это те, у которых ротор и магнитное поле питающего напряжения вращаются синхронно.
- Асинхронные. У них отличается частота вращения ротора от частоты, создаваемого питающим напряжением магнитного поля. Бывают они многофазными, а также одно-, двух- и трехфазными.
- Электродвигатели шаговые отличаются тем, что имеют конечное число положений ротора. Фиксирование заданного положения ротора происходит за счет подачи питания на определенную обмотку. Путем снятия напряжения с одной обмотки и передачи его на другую осуществляется переход в другое положение.
К электродвигателям постоянного тока относят те, которые питаются постоянным током. Они, в зависимости от того, имею или нет щёточно-коллекторный узел, подразделяются на:
Коллекторные также, в зависимости от типа возбуждения, бывают нескольких видов:
- С возбуждением постоянными магнитами.
- С параллельным соединением обмоток соединения и якоря.
- С последовательным соединением якоря и обмоток.
- Со смешанным их соединением.
Электродвигатель постоянного тока в разрезе. Коллектор со щетками – справа
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.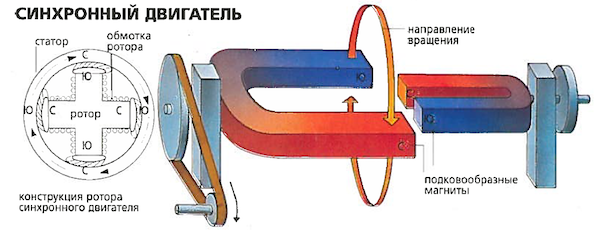
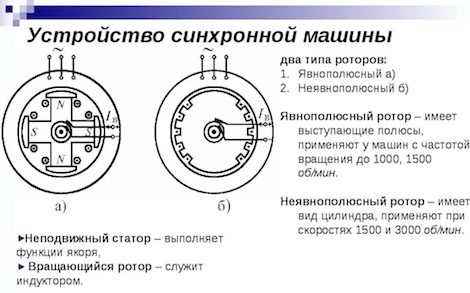
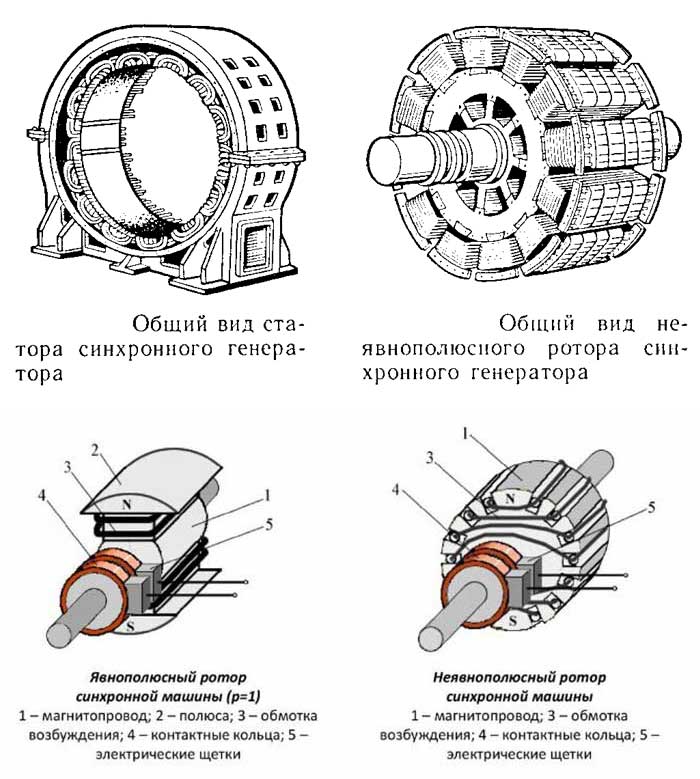
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
СПОСОБЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
Добиться плавного пуска удается за счет использования дополнительного двигателя или же посредством асинхронного запуска.
Первый случай не требует пояснений, а во втором используется принцип асинхронности вращения э/м полей, приводящих к эффекту скольжения на начальном этапе работы. У каждого из этих вариантов имеются свои достоинства и недостатки.
При выборе подходящего для конкретных условий способа запуска обязательно учитываются конструктивные особенности ротора.
Для эффективного управления режимами работы синхронного двигателя используется зависимость частоты вращения ротора от питающего напряжения.
При заданном значении токовой составляющей такое управление сводится к изменению мощности на валу. Реализовать его удается различными способами, но наиболее эффективными считаются электронные устройства (преобразователи).
Для управления режимами работы применяются современные полупроводниковые компоненты. К последним относятся транзисторы, тиристоры и симисторы.
С помощью этих быстродействующих элементов удается менять величину мощности в нагрузке, используя принципы широтно-импульсного или фазоимпульсного регулирования.
* * *
2014-2021 г.г. Все права защищены.Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
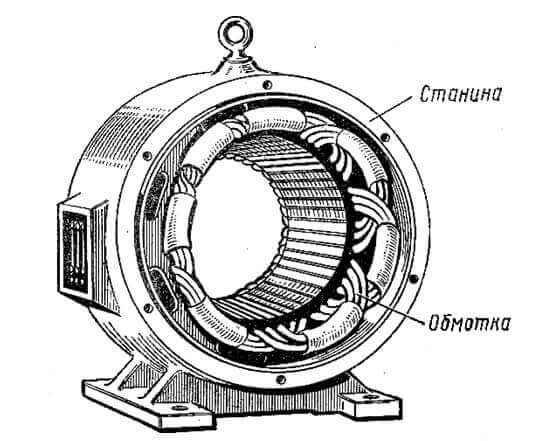
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
п =т =
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
(рОбмотка с двумя парами полюсов на каждую ветвь
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
dsiaeiam.aei=p—am.aeiτp
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Источник
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
Формула
В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Применение синхронных двигателей:
- Эти двигатели используются как первичные двигатели (приводы) для центробежных насосов, поршневых компрессоров с ременным приводом, воздуходувок, бумажных фабрик, резиновых фабрик и т.д. Из-за их высокой эффективности и высоких скоростей (об / мин выше 600).
- Низкоскоростные синхронные двигатели (об / мин ниже 600) широко используются для привода многих поршневых насосов. Таких как винтовые и шестеренные насосы, вакуумные насосы, дробилки, машины для прокатки алюминиевой фольги.
- Эти моторы также широко используются на борту судов. Навигационное оборудование корабля, такое как гирокомпас, использует специальный тип синхронного двигателя. Они также используются в качестве первичных двигателей для Viscometer. Это устройства для измерения / регулирования вязкости мазута главного двигателя.
- Большинство фабрик и производств используют бесконечное количество индуктивных нагрузок. Они могут варьироваться от ламповых ламп до мощных асинхронных двигателей. Таким образом, эти индуктивные нагрузки имеют значительный коэффициент мощности отставания. Синхронный двигатель с избыточным возбуждением (синхронный конденсатор), имеющий ведущий коэффициент мощности, используется для улучшения коэффициента мощности этих систем питания.
- Эти двигатели также используются для регулирования напряжения, когда происходит сильное падение / повышение напряжения. Так же когда тяжелая индуктивная нагрузка включается / выключается в конце длинных линий электропередачи.
- Синхронные двигатели могут работать на сверхнизких скоростях с помощью мощных электронных преобразователей, которые генерируют очень низкие частоты. Примерами этих двигателей являются диапазоны мощностью 10 МВт, используемые для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм). Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
Конструктивно роторы бывают разными устройством и по конструкции.
В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.

Принцип работы
Сначала к обмоткам возбуждения подводится ток постоянно величины. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.

С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
Сфера применения
Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т. д.

Как подключить электродвигатель 380В на 220В
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь эля этого нужные специальные устройства: возбудитель, выпрямитель.
- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.
Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
 СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В