Как работает кан шина в автомобиле
Содержание:
- Инструкция по подключению сигнализации по CAN-шине
- Неисправности
- Разработка сниффера и изучение протокола CAN шины
- Режимы работы
- Работа с терминалом
- Преимущества и недостатки встроенных шин
- Схема организации обмена данными
- Что такое CAN-шина
- 3 Кан-интерфейс и диагностика системы
- Разновидности и маркировка
- Система передачи данных по шине CAN
- Какие системы входят в современную Can шину автомобиля
- Как подключить сигнализацию по CAN-шине
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
Процесс проверки:
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
https://youtube.com/watch?v=kVjWxMY63-4
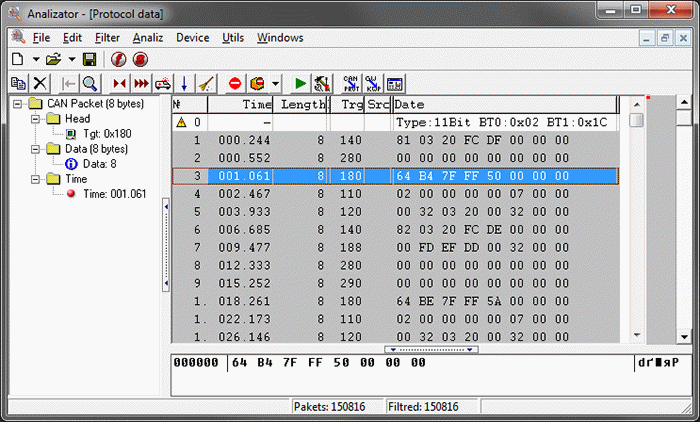
Разработка сниффера и изучение протокола CAN шины

После того как я получил доступ к прослушиванию CAN шины, мне нужно расшифровать кто кому и что передает. Формат пакета CAN показан на рисунке.

Все утилиты из набора can-utils сами умеют разбирать CAN пакеты и отдают только полезную информацию, а именно:
- Идентификатор
- Длина данных
- Данные
Для macOS я написал простое приложение, которое для каждого адреса устройства добавляет ячейку в табличку и в этой ячейке я уже вижу какие данные меняются.

Нажимаю кнопку стеклоподъемника я нашел ячейку в которой меняются данные, затем я и определил какие команды соответствуют нажатию вниз, нажатию вверх, удержанию вверх, удержанию вниз.
Проверить, что команда работает, можно отправив из терминала, например команду поднять левое стекло вверх:
Cansend can0 181#0200
Команды, которые передают устройства по CAN шине в автомобилях VAG (Skoda Octavia 2011), полученные методом реверс-инжиниринг:
// Front Left Glass Up
181#0200
// Front Left Glass Down
181#0800
// Front Right Glass Up
181#2000
// Front Right Glass Down
181#8000
// Back Left Glass Up
181#0002
// Back Left Glass Down
181#0008
// Back Right Glass Up
181#0020
// Back Right Glass Down
181#0080
// Central Lock Open
291#09AA020000
// Central Lock Close
291#0955040000
// Update Light status of central lock (Когда отправляешь команду открыть/закрыть замок то на кнопке управления замком светодиод не изменяет состояние, чтобы он показал реальное состояние центрального замка, нужно отправить команду обновления)
291#0900000000
Мне было лень изучить все остальные устройства, поэтому в этом списке, только то что мне было интересно.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса
Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Преимущества и недостатки встроенных шин
Как и у каждой системы у CAN-шины есть свои позитивные негативные характеристики. Основные плюсы заключаются в таких факторах:
- за счет высокого быстродействия устройства способны практически мгновенно связываться пакетными данными;
- кабельные установки выдерживают воздействие электромагнитых помех;
- электроника наделена системой контроля с несколькими уровнями, что способствует минимизации возникновения ошибок во время приема/передачи пакетов данных;
- за счет автоматики шина самостоятельно распределяет по CANалам скорость, оказывая позитивное влияние на работу электронных систем в целом;
- производители позаботились о достаточной степени безопасности цифрового интерфейса, поэтому внешние несанкционированные подключения будут мгновенно заблокированы;
- использование в конструкции цифрового интерфейса позволяет без проблем осуществлять монтаж сигнализации либо иных систем безопасности с минимальным взаимодействием с бортовой штатной системой.
Важно знать минусы установки шин:
- определенные модели интерфейсов рассчитаны на лимитированный объем пакетных данных, что является малоприемлемым для современных автомобилей, нашпигованным большим количеством электроники. Если добавлять к шине новых источников данных, то это негативно скажется на нагрузке, а также существенно повысит время отклика оборудования;
- передаваемые данные по каналам связи обладают исключительным назначением. Полезная информация отнимает минимум трафика;
- может случаться отключение стандартизации из-за внедрения протокола повышенного уровня.
Более стабильно работают интерфейсы последних поколений. Предпочтительней выбирать машины с такими шинами.
Схема организации обмена данными
Шина данных
p, blockquote 18,0,0,0,0 —>
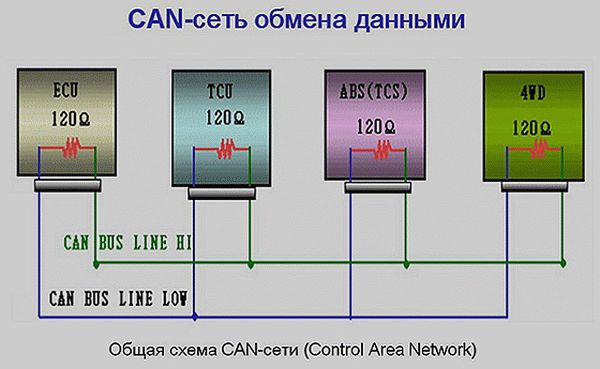
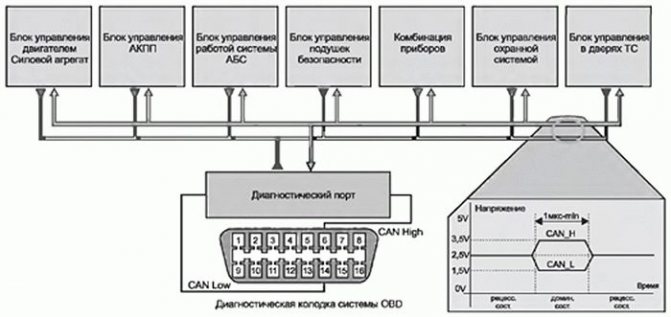
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:
p, blockquote 19,0,0,0,0 —>
p, blockquote 20,0,0,0,0 —>
Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
p, blockquote 21,0,0,0,0 —>
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.
p, blockquote 22,1,0,0,0 —>
На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.
p, blockquote 23,0,0,0,0 —>

p, blockquote 24,0,0,0,0 —>
Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.
p, blockquote 25,0,0,0,0 —>
p, blockquote 26,0,0,0,0 —>
Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
p, blockquote 27,0,0,0,0 —>
Основные режимы работы CAN-шины:
p, blockquote 28,0,0,0,0 —>
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
p, blockquote 29,0,0,0,0 —>
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
p, blockquote 30,0,0,0,0 —>
p, blockquote 31,0,0,0,0 —>
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
3 Кан-интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
 ЭБУ двигателя с межсетевым интерфейсом
ЭБУ двигателя с межсетевым интерфейсом
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере
Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.
Какие системы входят в современную Can шину автомобиля
- цифровая шина силового агрегата;
- электронные блоки управления двигателем и КПП;
- блоки управления АБС и подушками безопасности;
- блоки для управления ТНВД и рулевым механизмом;
- электронный замок зажигания и центральный монтажный блок;
- датчик для определения угла поворота руля;
- специальная цифровая шина для системы «Комфорт»;
- электронные блоки дверей и контроля парковки;
- блок управления стеклоочистителями и контроля давления в шинах;
- навигационная и информационная система;
- звуковая система.
В этот список не ходят внешние системы, которые можно подключать к цифровой шине. На месте таких может быть автосигнализация или дополнительное оборудования подобного типа. Получать информацию с кан шины и следить за тем, как работает анализатор можно при помощи компьютера. Для этого необходима установка дополнительного адаптера. Если к кан-шине подключена сигнализация и дополнительно маяк, то можно управлять некоторыми системами автомобиля, используя для этого мобильный телефон.
Не каждая сигнализация имеет возможность подключения к цифровой шине. Если владелец автомобиля хочет, чтобы его автосигнализация имела дополнительный возможности, а он постоянно мог управлять системами своего автомобиля на расстоянии, стоит задуматься о покупке более дорогого и современного варианта охранной системы. Такая сигнализация легко подключается к проводу кан шины и работает очень эффективно.
Как подключить сигнализацию по CAN-шине
Для подключения КАН-шины своими руками к автосигнализации машины с автозапуском либо без него надо знать, где находится блок управления противоугонной системой. Если установка сигнализации осуществлялась самостоятельно, то процесс поиска не вызовет сложностей у автовладельца. Управляющий модуль обычно ставится под приборной панелью в районе рулевого колеса либо за контрольным щитком.
Как произвести процедуру подключения:
- Противоугонная система должна быть установлена и подключена ко всем узлам и элементам.
- Найдите толстый кабель оранжевого цвета, он подключается к цифровой шине.
- Адаптер противоугонной системы подсоединяется к контакту найденной шины.
- Производится монтаж устройства в надежном и удобном месте, девайс фиксируется. Надо заизолировать все электрические цепи, чтобы не допустить их перетирания и утечки тока. Производится диагностика правильности выполненной задачи.
- На завершающем этапе настраиваются все каналы для обеспечения рабочего состояния системы. Также надо задать функциональный ряд устройству.
Загрузка …